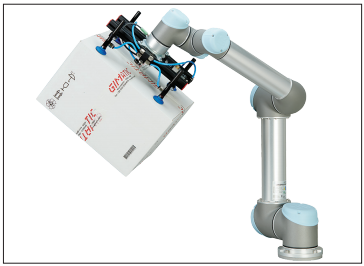
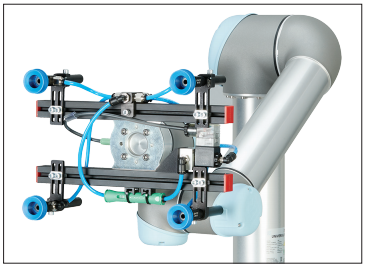
KIT-UR-V
这种带真空系统的末端夹具(EOAT)用于产品的取放.
该系统包括了气动执行器和相关元件,可以装备在协作机器人UR、UR5和UR10上,与机器人的腕部相连接,从而连接气源.
主要特点
•独特的设计,同时适用于UR3,UR5以及UR10.
•无需沿着机器人本体布线:直接通过M8的插头连接机器人.
•易于安装,没有其他配件(即插即用).
•基于真空发生器、阀和螺线管.
如何工作
通过机械法兰将夹具连接到机器人的腕部,并连接主要阀门控制气源通断.
该系统可以直接通过M8的插头直接连接到机器人的腕部 (无需沿着机器人的本体布线).
系统可以通过数字的输出和UR机器人的人机界面进行交互.