KIT-UR
-
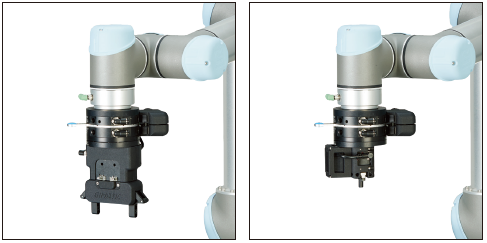
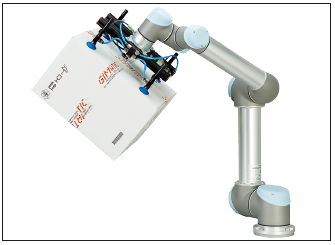
KIT-UR-G
带有塑胶盖和电容器盒的 2 手指型电动平行抓持器。该系统可以直接安装到协作机器人UR3, UR5 或UR10上,电源盒可以直接连接到机器人腕部。该系统还包含了一对标准夹片.
主要特点
• 独特的设计,同时适用于UR3,UR5以及UR10.
• 无需沿着机器人本体布线:直接通过M8的插头连接机器人.
• 易于安装,没有其他配件(即插即用).
• 模拟接近开关功能,用于夹取或者是行程终端的检测.
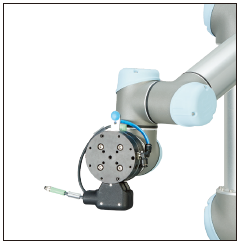
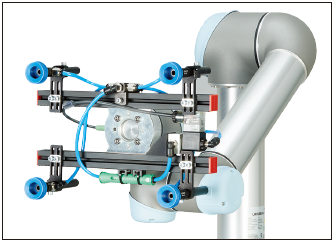
KIT-UR-V
这种带真空系统的末端夹具(EOAT)用于产品的取放.
该系统包括了气动执行器和相关元件,可以装备在协作机器人UR、UR5和UR10上,与机器人的腕部相连接,从而连接气源.
主要特点
• 独特的设计,同时适用于UR3,UR5以及UR10.
• 无需沿着机器人本体布线:直接通过M8的插头连接机器人.
• 易于安装,没有其他配件(即插即用).
• 基于真空发生器、阀和螺线管.
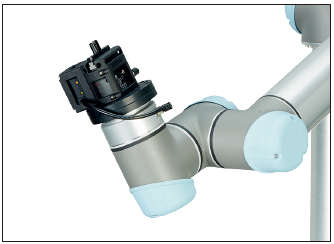
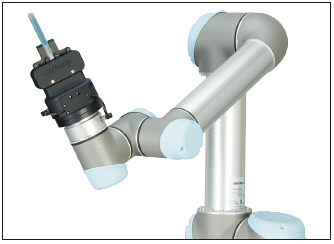
KIT-UR-J
配有内置式电容器盒的平行四边形电动抓持器。该抓持器可以安装到 Universal Robots公司的所有协作机器人(UR3、UR5、UR10)上,同时集成电容器盒允许直接连接到机器人的手腕。该抓持器适合短时打开和关闭的长行程,抓持力恒定,而不管定制抓持手指的长度。通过安装Gimatic 开发的 URCap 插件,用户只需配置设备一次,表明需要抓持的一系列部件并定义抓持类型(内部或外部),然后自动更新施加到机器人上的负载以及抓持点的坐标。该插件还允许在相同机器人处理程序内同时管理多个 Gimatic 套件。
主要特点
• 一种产品适用于所有 UR3、UR5 和 UR10 机器人.
• 无需沿着机器人手臂布置线缆:直接连接到机器人手腕的 M8
连接器上.
• 安装简便、无需配置(即插即用解决方案).
集成模拟行程端部传感器和工件抓持传感器.
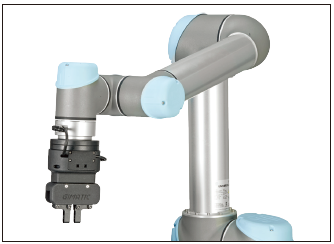
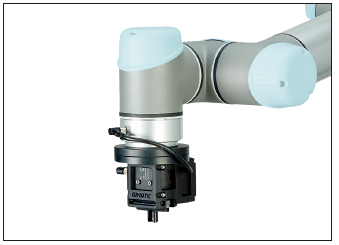
KIT-UR-QC
KIT-UR-QC 是一个专用于 Universal Robots 公司的协同机器人套件,其作用是手动工具更换。该套件由两个主要部件组成:一个部件 (QCY90-A) 永久固定到机器人手腕,另一个部件 (QC90-B)永久连接到工具。用户通过手动移动手柄,可以连接或断开两个部件,从而执行快速和方便的工具更换。该系统可装配到 UR3、UR5 和 UR10 机器人上,包括建立电动和气动连接需要的所有元件,以将动力从机器人传输到工具。整个系统是一个直接连接机器人手腕的即插即用设备,可用于传输加压空气或真空。在单台机器人必须与多个工具互动的情况下,可以根据要求提供额外的单独 QC90-B 单元,以创建更复杂的系统。
主要特点
• 一种产品适用于所有 UR3、UR5 和 UR10 机器人
• 无需沿着机器人手臂布置线缆:直接连接到机器人手腕的 M8连接器上
• 安装简便、无需配置(即插即用解决方案)
• 直接兼容用于 Universal Robots 公司机器人的其它 Gimatic 专用产品,例如 KIT-UR-G 和 KIT-UR-V
• 随附气动接头和电气连接器